中國新能源汽車市場走勢
-
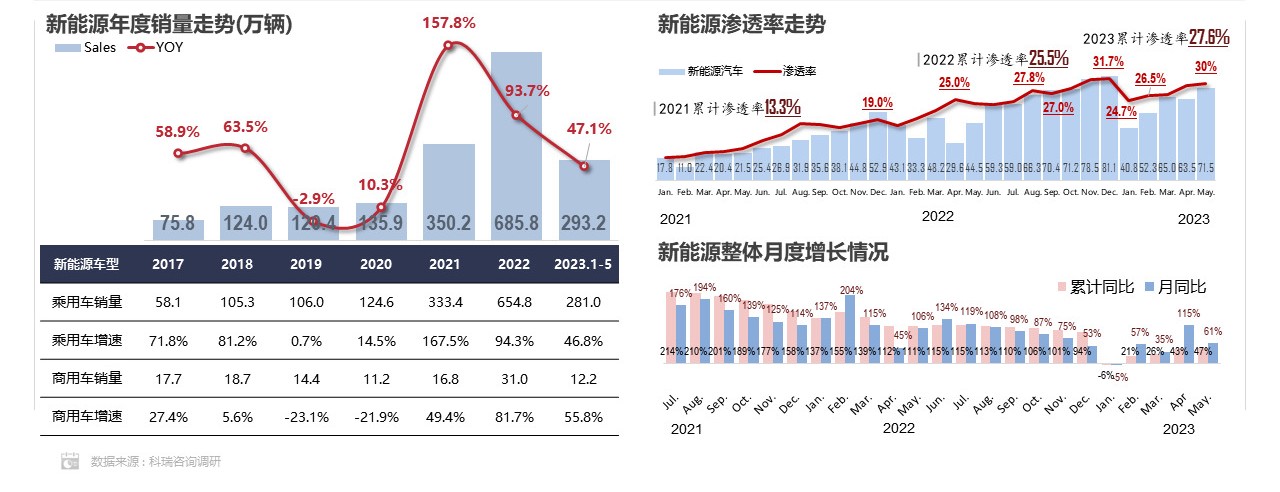
中國新能源汽車市場,2023年5月銷售71.5萬輛,環比增長12.6%,同比增長60.7%,滲透率達到 30%。其中乘用車銷售68.9萬輛,環比增長13.2%,商用車銷售2.5萬輛,環比下降3.3%,同比增長42.4%。5月中國新能源汽車市場,延續良好表現,市場滲透率穩步提升。
中國新能源汽車市場結構
-
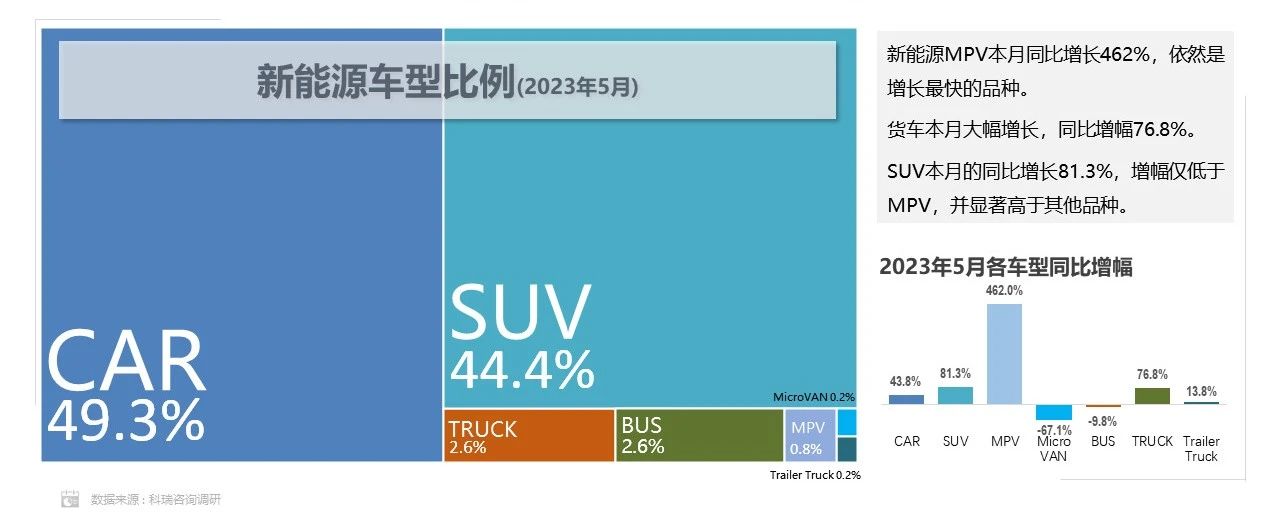
2023年5月,新能源轎車占新能源汽車整體的49.3%,比去年同期降低5.8個百分點;新能源SUV占比44.4%,同比增長5個百分點。新能源MPV和SUV同比增長明顯,分別為462%和81.3%。新能源MPV本月同比增長462%,依然是增長最快的品種。貨車本月大幅增長,同比增幅76.8%。SUV本月的同比增長81.3%,增幅僅低于MPV,并顯著高于其他品種。

裝車率統計——級別分布
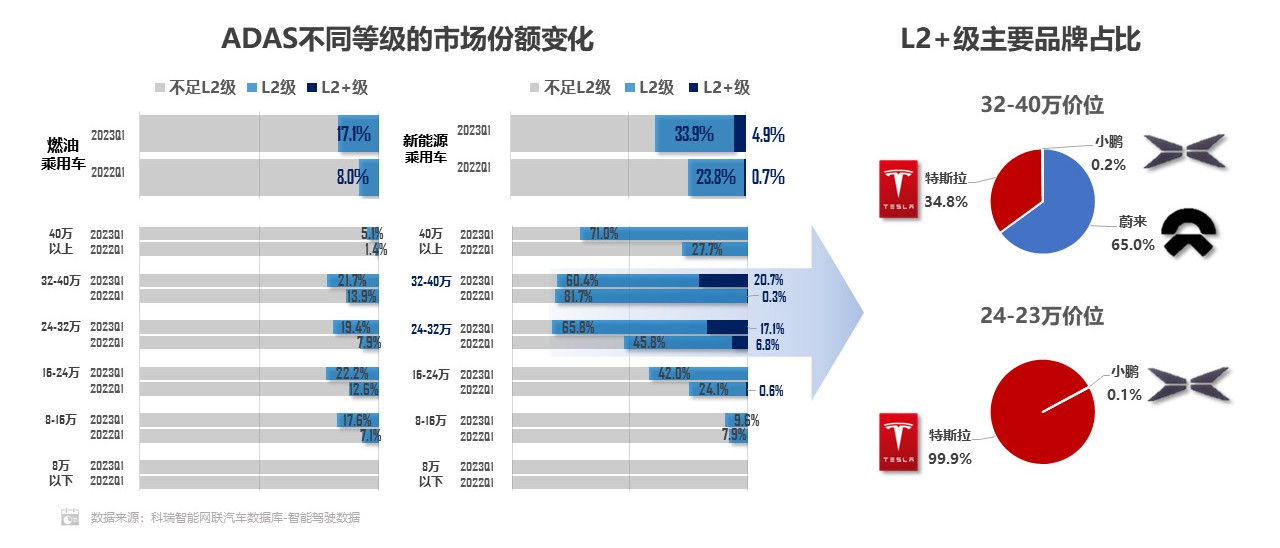
從裝車比例上看,新能源乘用車在L2級以上的裝車比例要顯著高于燃油車型。在2023年1季度,新能源乘用車L2+級輔助駕駛的裝車占比已經達到了4.9%,比去年同期高了4.2個百分點。燃油車方面還沒有L2+級的車輛銷售。從價位來看,24萬以上價位的新能源乘用車,在2023年1季度有七成以上的車輛達到了L2級以上。各價位的增長勢頭都非常顯著。而同價位的燃油車市場,L2級占比僅有兩成左右。盡管增勢也很明顯,但與新能源市場差距仍然很大。
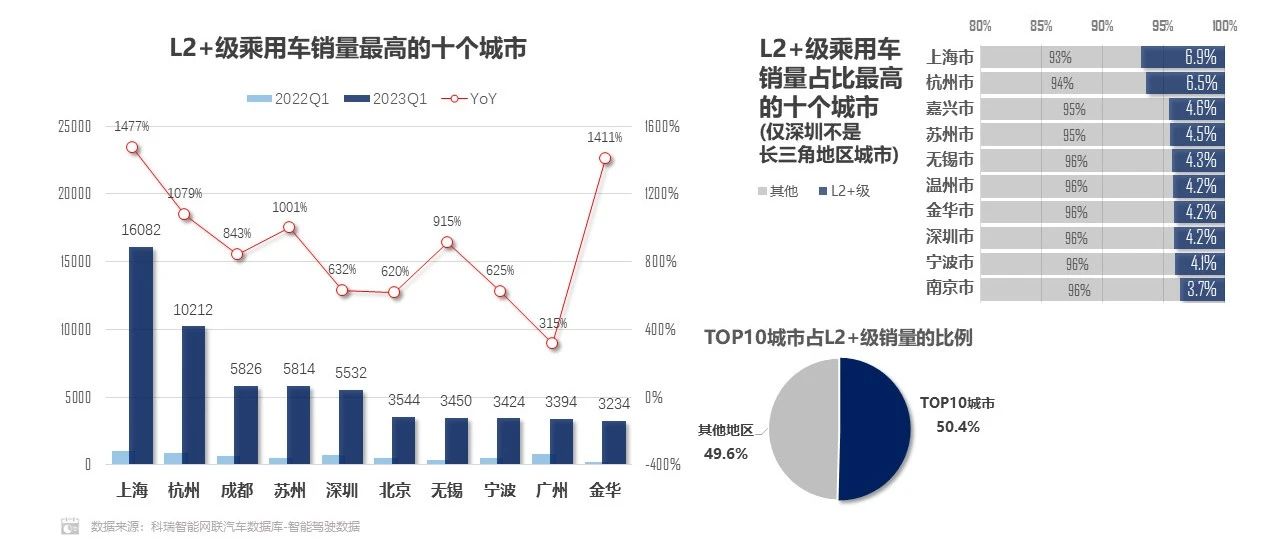
在地區分布上,L2+級的乘用車主要在江浙一代銷售。L2+級占比最高前十位城市中,只有深圳不在江浙地區。從L2+級車輛的銷量規模看,上海、杭州兩市遙遙領先其他各地。成都、蘇州和深圳在2023年1季度銷量達到5000輛規模。排在6-10位的北京、無錫、寧波、廣州、金華集中在3000輛的水平。目前前十位城市的銷量總規模已經達到了全國的一半。市場需求非常的集中。
裝車率統計——AEB自動緊急制動功能
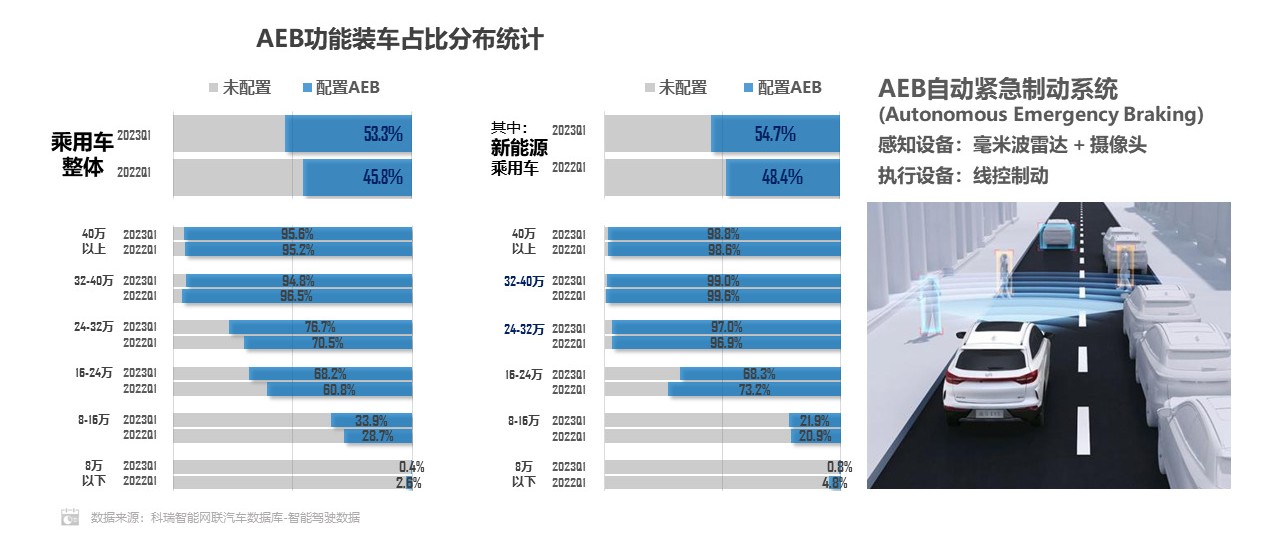
AEB自動緊急制動系統的普及情況非常好。32萬元以上的乘用車基本上已經完成了AEB的普及。裝車占比超過了九成。在新能源領域,AEB的普及價格甚至下移到了24萬價位。在16-32萬區間,AEB的普及趨勢也非常明顯,裝車占比達到了六成以上。是市場非常歡迎的配置。在8-16萬區間,由于新能源乘用車成本的壓力,AEB的裝車占比要落后于整體乘用車裝車占比,僅有乘用車整體水平的2/3。在8萬以下的市場區間,AEB的占比出現顯著下降,2023一季度已經降至不足1%。
裝車率統計——全速域ACC自適應巡航功能
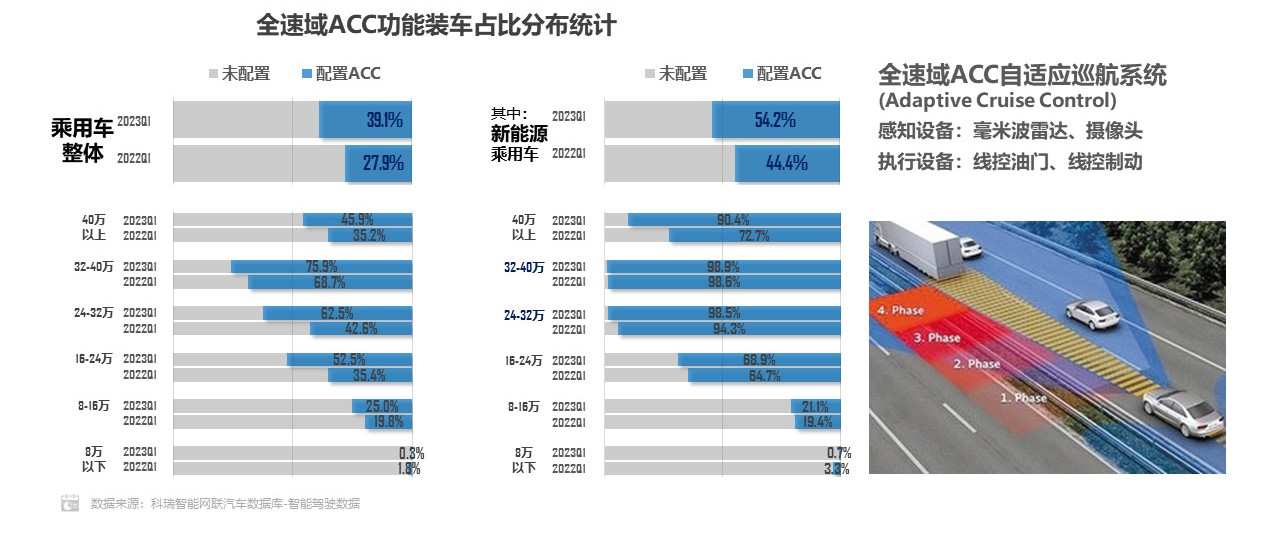
全速域ACC自適應巡航在今年一季度的裝車占比達到了39%,其中新能源乘用車領域的裝車占比更是達到了54%。與去年同期對比看,盡管乘用車各價位的裝車占比都有明顯的提高,但在新能源領域,同比增幅還是要顯著小于市場整體水平。這與大部分新能源產品在去年上市初期就一步到位的配置了高階輔助駕駛系統有關。目前24萬以上的新能源乘用車基本完成了全速域ACC的普及,16-24萬價位的裝車率也接近了七成的水平。此技術的下階段普及將轉由燃油車推動。從當前勢頭看,16-32萬燃油車的裝車率提升幅度最大。
裝車率統計——ALC自動變道功能
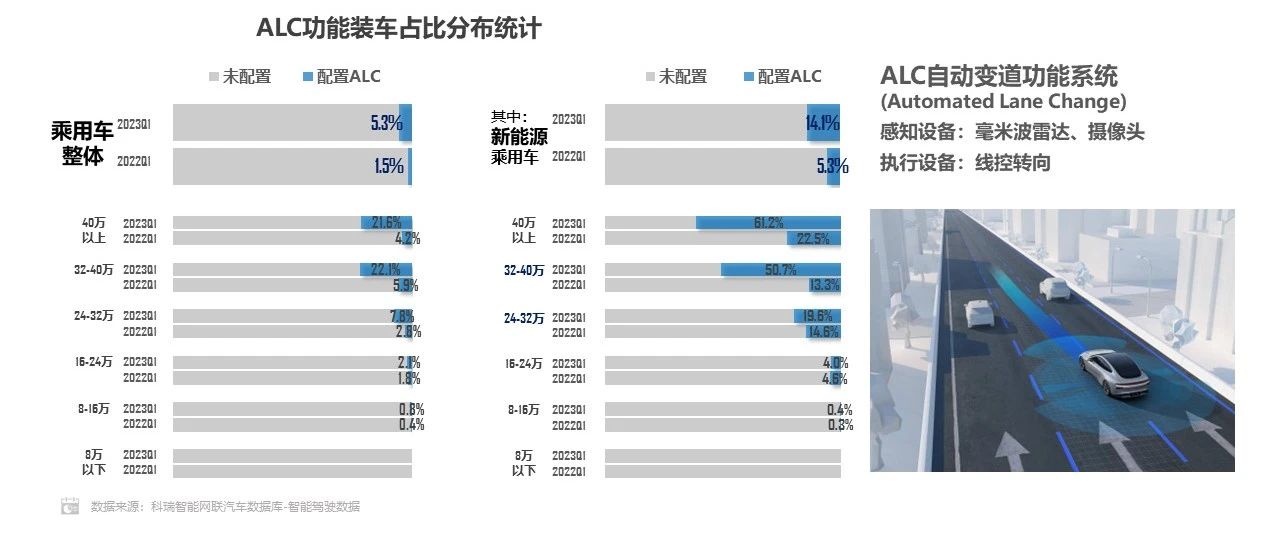
ALC自動變道功能在今年一季度的裝車率顯著要高于去年同期。配置率最高的市場區間是32萬以上的新能源乘用車市場,其中40萬以上價位的裝車率已經突破六成,比去年同期提高了接近40個百分點。32-40萬區間的裝車率也達到了五成,比去年同期提高了37個百分點。盡管部分市場增長迅速,但乘用車整體的裝車率僅有5.3%,其中新能源乘用車的裝車率也僅有14%。由于ALC功能較為復雜,需要在產品中期改型或換代才能增加。該功能近期占比的增長將依賴全新車型的投放,因此短期不會出現明顯的普及趨勢。
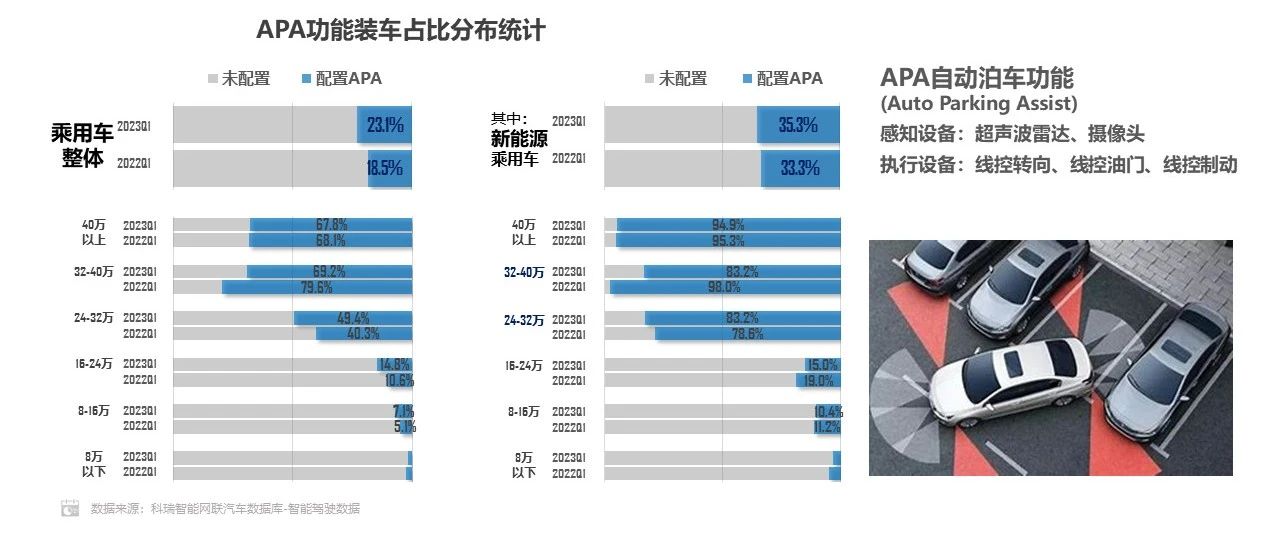
裝車率統計——APA自動泊車功能
-
APA自動泊車技術已經在傳統燃油車領域發展多年。由于成本高昂、配置規模一直較低。由于高級輔助駕駛功能的發展,多家輔助駕駛企業推出了行泊一體的技術方案。用輔助駕駛的技術架構實現自動泊車功能。該技術一方面提高了輔助駕駛系統的性價比,另一方面加快了APA的普及速度,并為自動泊車提供了遙控泊車、循跡泊車以及自主代客泊車等高級泊車功能。目前新能源乘用車已經有三分之一配置了APA功能。在今年一季度,32-40萬價位的裝車率有了一定的下降。24-32萬區間有了一定的提高。由于APA功能可通過OTA付費模式進行在線升級,部分車型隨即將APA功能移出了標準配置。

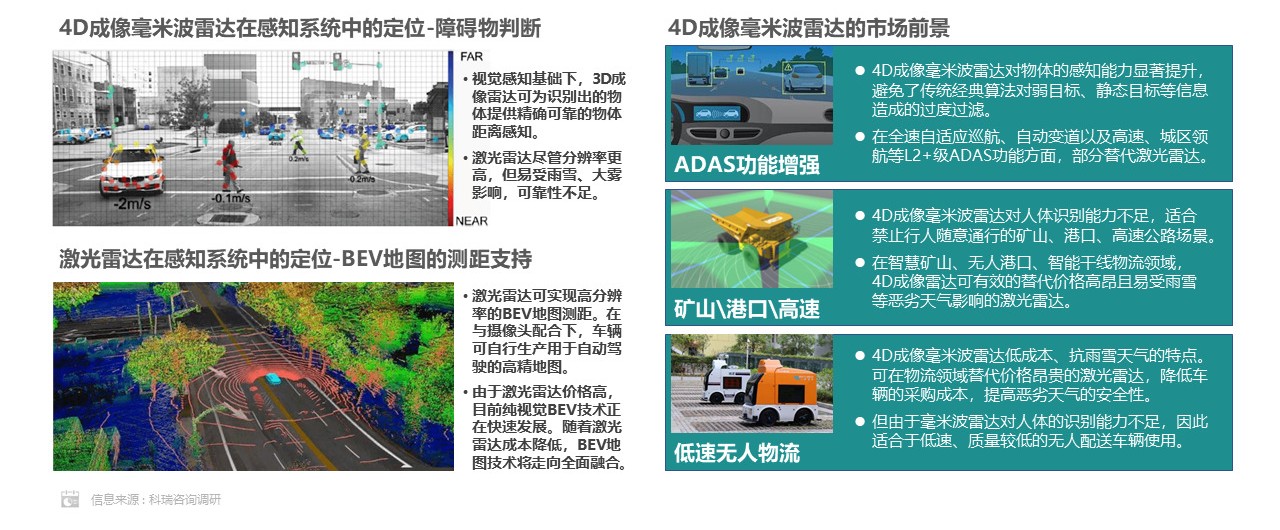
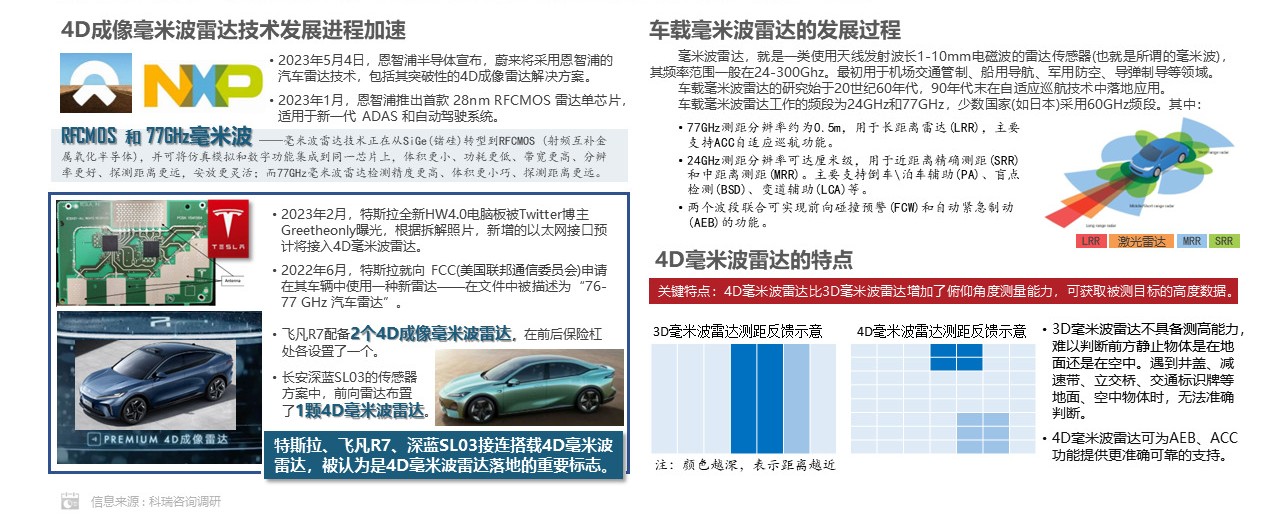
毫米波雷達的4D化是近期重要的技術趨勢。由于傳統毫米波雷達因為不具備測高能力,會將交通標識牌、龍門架、立交橋等空中障礙物視為危險。為避免誤剎車,AEB算法便將毫米波雷達判斷的靜止物體進行忽略。這就使車輛可能會撞到視覺感知系統分辨不出的靜止物體。比如濃霧中的靜止車輛或白色的障礙物。4D毫米波雷達是傳統毫米波雷達的升級,在測量障礙物距離、水平角度、速度之外,增加了垂直角度的測量能力。垂直角度增加后,4D雷達的感知結果就形成了類似低分辨率的照片一樣效果。盡管無法描述物體的形狀,但已經可以清楚的分辨不同物體的位置差異。這使4D雷達在障礙感知方面的優勢可以充分發揮。
-
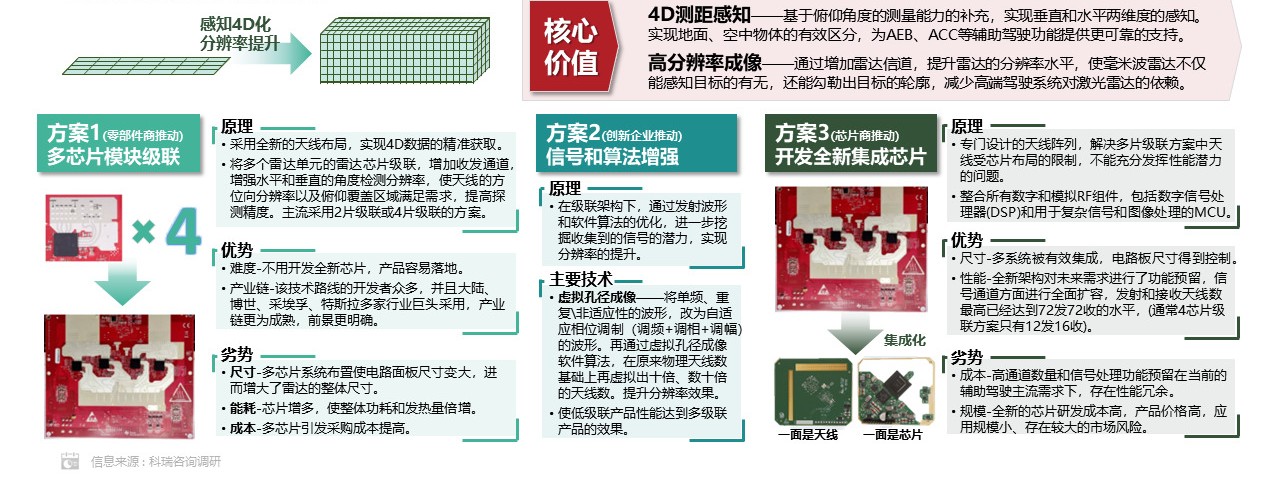
在4D化的同時,通過提升雷達的分辨率水平,使毫米波雷達不僅能感知目標的有無,還能勾勒出目標的輪廓,這使4D成像雷達可在一定程度上降低高端駕駛系統對激光雷達的依賴。而雷達分辨率的提升需要在天線設計和信號處理兩方面同步增強。目前傳統零部件巨頭、芯片巨頭、以及我國創新企業正在多路線推動產品的落地。
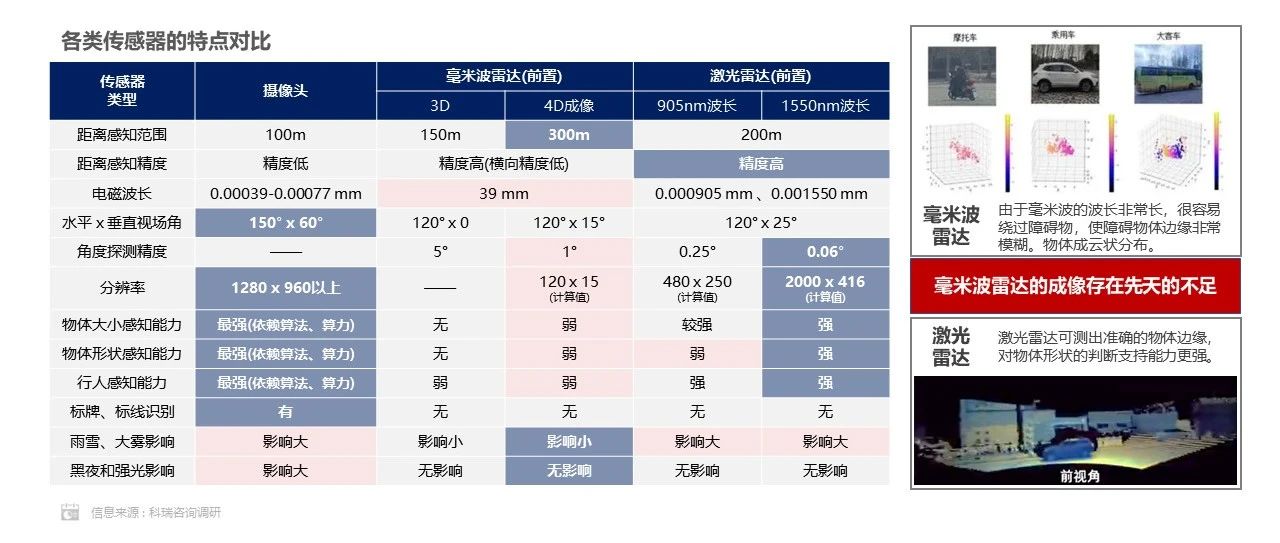
毫米波雷達感知距離遠,并且環境適應能力強,可彌補攝像頭在夜晚、雨霧天、逆光環境下性能不足的問題。同時,4D毫米波成像雷達與攝像頭可形成互補感知方案,基本消除兩者的短板。在精度要求不高的領域,可有效解決激光雷達成本高的問題。 但由于波長過長,毫米波可輕易繞過小尺寸的障礙物,因此毫米波雷達對物體邊緣的感知精度顯著低于激光雷達和攝像頭。所有物體在4D毫米波雷達的感知下,都會形成云狀的影像。即使增加分辨率,也無法有效的改善。
-
因此4D毫末波雷達的關鍵用途將是顯著提升AEB、ACC等系統對前方障礙物感知能力。推動相關技術的換代升級。在沒有行人、成本關注較高的場景中,4D毫米波雷達可分流激光雷達的部分市場需求。在高級別自動駕駛領域,攝像頭+激光雷達+4D成像雷達相互配合,可保障車輛在各種場景、天氣下實現安全的自動駕駛。